ドローンを活用した山岳遭難者の探索システム
システム概要
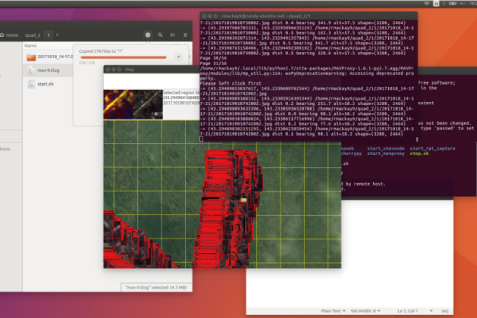
Japan Innovation Challenge 2017 -ロボットによる山での遭難救助-にTAP-J(Team ArduPilot Japan)の一員として参加。遭難者を想定したマネキンが山に設置されドローン(eLAB470 クアッドコプター)を用いた自動航行と画像解析ツール(CUAV)により人体の自動判定を行うシステム。




開発工数
開発期間:6カ月
お問い合わせ
上記開発事例や、その他開発についてのお問い合わせは下記よりお願いいたします。